

Einige haben ihn schon gesehen oder zumindest von ihm gehört: Charly ist in der Schule.
Fast lautlos gleitet der Schulroboter Charly durch die Flure, ruft ein „Hallo“ zu Schülern und Lehrern, bleibt stehen und stellt sich vor, unterhält sich und lacht. Aber wie macht er das?
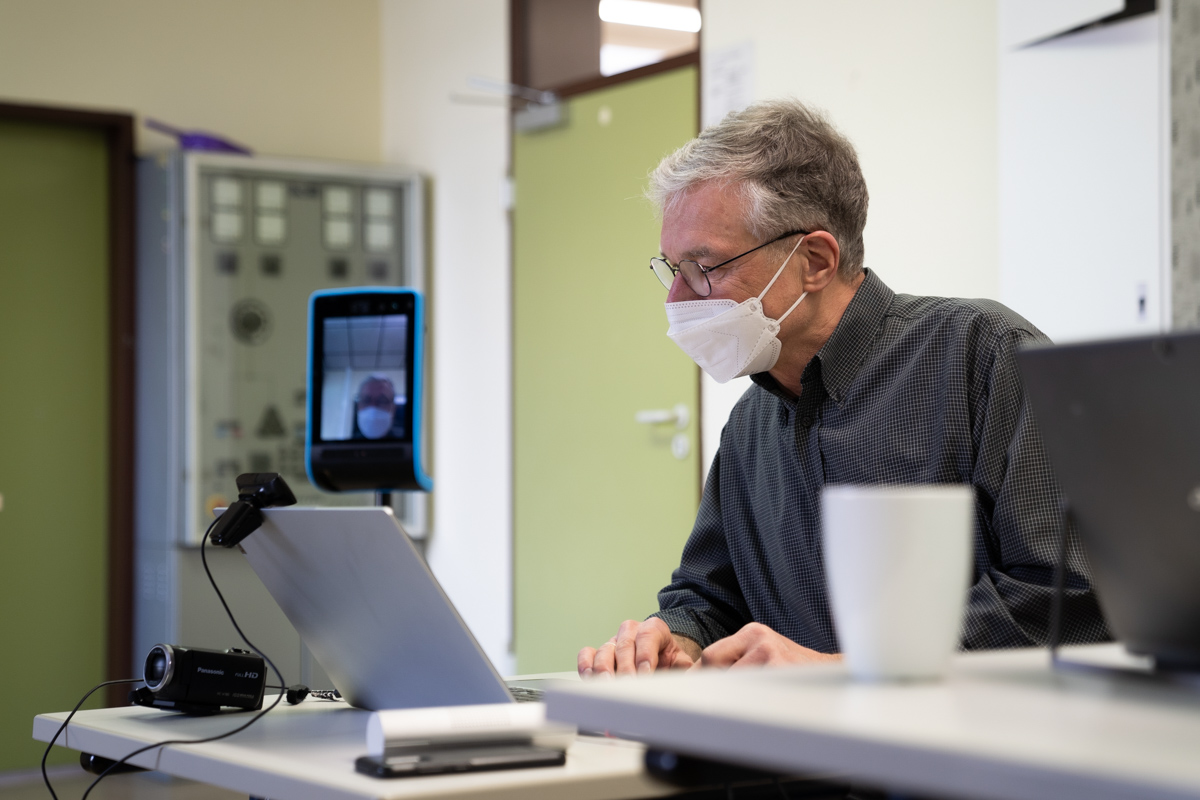
Wenn man genau hinsieht, kommt einem das Gesicht im Display des Roboters doch sehr bekannt vor. Ist das nicht … ja genau das ist doch ein Mitschüler!
Charly ist ein Telepräsenz-Roboter, der über einen Laptop oder Tablet von zu Hause aus gesteuert werden kann von allen Schülerinnen, die gerade nicht zur Schule gehen können.
Der/ die zugeschaltete Schüler/in kann sich mit Charly im Raum frei bewegen, zoomen, drehen und sprechen und so am Unterricht fast ohne fremde Hilfe teilnehmen und sich auch mit den Klassenkameradinnen unterhalten.
„Diese Form des hybriden Unterrichtens kommt dem durchgehend präsenten Unterrichten sehr nahe. Die Partizipation durch den Roboter liegt zum größten Teil in der Hand des Lernenden. Die didaktisch- methodische Aufbereitung bleibt bei der Lehrkraft nicht aber die technische Aufsicht.“

Charly to go ist ein Pilotprojekt, das zusammen mit IT-Technikern, Vertretern der Humboldt-Universität und Pädagog:innen den praktischen Einsatz von Telepräsenzsystemen in der Toulouse-Lautrec-Schule erprobt. Neben Stabilität, Bedienbarkeit und Qualität werden Datenschutzaspekte untersucht.
Eins ist aber jetzt schon klar, eine lange Einweisung brauchen die SchülerInnen nicht, ob per Tastenkombination oder Maus- und Joystick-Bewegung , die Steuerung von Charly ist so leicht wie ein Computerspiel.
Hier treffen Technik, Wissenschaft und Sonderpädagogik in einem spannenden Projekt aufeinander.
Initiator des Projektes ist Michael Knießner. Dr. Holger Hünermund von der Humboldt Universität ist Partner des Projektes. Und ohne Christa Nink, Manuel Ewert und unserer Schulleiterin Uta Eling würde dieses Projekt nicht so an unserer Schule stattfinden können.